Ngày nay, hiệu suất của động cơ đã trở thành một trong những yếu tố quan trọng trong mục tiêu tiết kiệm năng lượng, và điều này đã khiến các nhà sản xuất phải không ngừng đưa ra những cải tiến cho hiệu quả động cơ của mình. Tuy nhiên, những thuật ngữ liên quan đến công nghệ động cơ có thể dễ gây nhầm lẫn vì đôi khi nhiều thuật ngữ có thể áp dụng ở các trường hợp rất cơ bản chứ không phải hàm ý một điều gì đó đột phá. Và một trong những thuật ngữ đó chính là động cơ “đồng bộ” và “không đồng bộ”.
Tất cả các động cơ dựa trên nguyên tắc cảm ứng điện từ ngày nay (induction motor – tạm goi tắt là động cơ điện từ) đều là động cơ không đồng bộ. Bản chất không đồng bộ của việc vận hành động cơ điện từ đến từ sự trượt giữa tốc độ quay của từ trường và tốc độ quay chậm hơn của rotor. Còn tại sao lại có sự trượt này thì lại thuộc một vấn đề chuyển sâu hơn về bên trong của động cơ.
Hầu hết các động cơ điện từ ngày này đề có một thành phần quay (rotor) hay còn được gọi là phần cảm , được mô phỏng kiểu lồng sóc ( tại vì nó giống như cái lồng để nhốt con sóc 😀 )
 Đây là hình ảnh mô phỏng của rotor lồng sóc
Đây là hình ảnh mô phỏng của rotor lồng sóc
Cái “Lồng sóc” này gồm nhiều thanh đồng hoặc nhôm bố trí như hình trên, nối với nhau bằng hai vòng dẫn điện ở hai đầu, làm các thanh ngắn mạch hoàn toàn với nhau. Phần lõi của rotor được làm bằng thép.
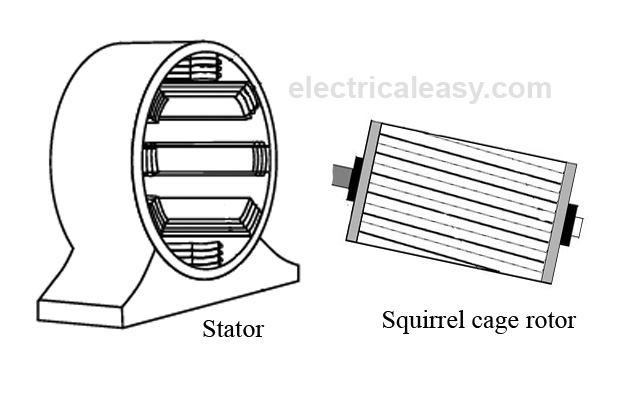
Bạn có thể nhìn thấy các rãnh chạy dọc theo rotor như trên hình. Các rãnh này cũng có lý do tồn tại của nó, và số lượng rãnh của rotor thường nhỏ hơn stator, và số lượng rãnh trên rotor không được là ước của stator, để tránh tình trạng mắc kẹt từ trường (magnetic interlock) khi khởi động động cơ.
Bên cạnh động cơ lồng sóc, chúng ta cũng có thể thấy nhiều loại động cơ sử dụng các cuộn dây. Lợi thế của kiểu cấu tạo này đó là có thể giảm bớt dòng khởi động của động cơ nhờ vào các điện trở được đấu nối tiếp vào mỗi cuộn dây. Các cuộn dây sinh ra dòng điện nhờ vào kiểu bố trí vòng trượt. Khi động cơ đã đạt đến tốc độ mong muốn, thì nó được chuyển qua một vòng ngắn mạch, và khi đó, vận hành tương tự như động cơ lồng sóc.
Bên dưới là sơ đồ nguyên lý của kiểu động cơ này
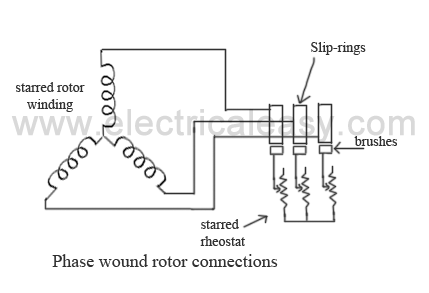
bạn có thể thấy ở đây có các chổi quét (brush) giúp thay đổi điện trở ( tương tự một số mạch khác sử dụng biến trở ). Khi động cơ đã đạt đến tốc độ mong muốn, các chổi quét này sẽ ngưng tiếp xúc ( hoặc trường hợp sử dụng biến trở, thì giá trị được chuyển về gần như bằng 0 ). Và mạch quay trở lại như mạch rotor lồng sóc.
Phần đứng yên trong động cơ được gọi là stator mà mình có đề cập đến ở trên., hay còn được gọi là phần ứng ( rotor được gọi là phần cảm, stator được gọi là phần ứng, ghép lại thành “cảm ứng” là nguyên tắc vận hành của động cơ điện từ, tiếng việt thật là vi diệu 😀 ). Stator được nối với một nguồn điện xoay chiều AC, cấp một điện áp cho stator để tạo ra dòng điện chạy bên trong nó. Dòng điện này sẽ tạo ra từ trường xoay chiều ảnh hưởng đến rotor, và tạo ra dòng điện cảm ứng bên trong rotor.
Cực bắc của stator sẽ cảm ứng với cực nam rotor (tương tự như nam châm hai cực hút nhau, con trai sẽ bị cảm ứng với con gái J ) . Nhưng vì cực của stator sẽ thay đổi liên tục theo dòng điện xoay chiều, nên cực của rotor của sẽ bị cảm ứng ( bị hút theo ) và như vậy sẽ làm quay rotor. Tuy nhiên, nếu bạn nào còn nhớ định luật Faraday, nói một cách đơn giản là dây dẫn mang điện chuyển động trong từ trường đứng yên, hoặc dây dẫn đứng yên trong từ trường chuyển động thì sẽ có một lực điện động được sinh ra. Vậy nên nếu rotor quay với đúng tốc độ quay của từ trường stator ? về mặt tương đối, thì ko có sự thay đổi giữa từ trường (của stator) và dây dẫn ( chính là cái lồng sóc ), như vậy thì sẽ không có lực và rotor sẽ không có lực tác động ( không bị cảm ứng ), khiến tốc độ của nó chậm hơn tốc độ của stator, và khi nó vừa chậm lại, thì đã có sự thay đổi trong từ trường, khiến nó lại quay, và cứ như thế…điều này giải thích cho vấn đề mà mình có đặt ra ở trên : tại sao tốc độ quay của rotor luôn chậm hơn từ trường stator (sự trượt)
Sự trượt này có thể rất khác nhau tùy vào tải của động cơ, nhưng nó cũng bị ảnh hưởng bởi điện trở của rotor và cường độ từ của trường mà từ thông stator cảm ứng.
Chúng ta hãy cùng đi vào vấn đề định lượng một chút nhé.
Dưới đây là một số công thức cơ bản để thể hiện mối liên hệ này giữa stator và rotor.
Khi nguồn AC cấp cho stator, Rotor vẫn đang đứng yên. Điện áp cảm ứng bên trong rotor có cùng tần số với điện áp của stator. Khi stator quay, điện áp cảm ứng trong rotor sẽ có tần số bị giảm đi, gọi là fr ( frequency rotor ). Nếu f là tần số của điện áp stator, và s là độ trượt thì ta có : fr = f.s (0≤ s≤ 1)
Khi rotor đứng yên, rotor và stator tạo thành một máy biến áp. Điện trường cảm ứng trong rotor được cho bởi phương trình : E = 4.44 f N фm
Với N = số dây dẫn ở một cực của stator ( thường khá nhỏ trong trường hợp động cơ lồng sóc ) và фm là từ thông tối đa, đơn vị là Webers. Khi rotor xoay, điện trường Er cảm ứng phụ thuộc vào độ trượt: Er = 4.44 s f N фm = s E
Giải thích về động cơ đồng bộ
Động cơ đồng bộ là cấu trúc động cơ đặc biệt mà rotor quay cùng tốc độ với tốc độ từ trường stator ( nên được gọi là đồng bộ ). Một ví dụ của động cơ đồng bộ chính là động cơ bước, được sử dụng nhiều trong các ứng dụng liên quan đến điều khiển vị trí (tay vận hành robot trong các nhà máy). Tuy nhiên, với sự phát triển gần đây của các mạch điện tử công suất, người ta đã có thể tối ưu thiết kế của động cơ đồng bộ để sử dụng cho các ứng dụng với công suất cao hơn như quạt, máy sấy, và thậm chí là trong động cơ xe địa hình.
Có hai loại động cơ đồng bộ :
- Kích từ độc lập – sử dụng nguyên tắc tương tự như động cơ điện từ và
- Kích từ trực tiếp – thường dùng với các nam châm vĩnh cữu, nhưng không phải lúc nào cũng vậy.
Động cơ kích từ độc lập, còn được gọi là động cơ từ trở thay đổi, gồm rotor thép có các răng, kiểu cực lồi. Chính các răng này sẽ khoác rotor với từ trường stator và làm rotor quay với tốc độc đồng bộ.
Để chuyển rotor sang vị trí kế tiếp, mạch điều khiển phải tuần tự chuyển công suất sáng các cuộn dây/pha stator một cách tuyến tính tương tự như động cơ bước.
Động cơ kích từ trực tiếp thì có nhiều tên gọi khác nhau như ECPM ( động cơ nam châm vĩnh cữu ) hoặc BLDC ( động cơ DC không chổi quét ), hoặc đơn giản là động cơ nam châm vĩnh cữu không chổi quét. Thiết kế này sử dụng một rotor có chứa các nam châm vĩnh cữu. Các nam châm này có thể được lắp trên bề mặt hoặc ráp ở phía trong ( trong trường hợp này được gọi là động cơ nam châm vĩnh cữu chìm )
Các nam châm vĩnh cữu là các cực lồi và giúp loại bỏ sự trượt. Một bộ vi xử lý điều khiển mạch công suất tuần tự trên cuộn dây stator sẽ sử dụng các công tắt chuyển trạng thái để giảm giật ( torque ripple ). Nguyên lý vận hành của các kiểu động cơ đồng bộ này cơ bản là tương tự nhau. Công suất được cấp cho các cuộn dây quấn trên các răng stator tạo ra một từ thông đi qua các khe hở không khí giữa rotor và stator. Dòng từ thông sẽ vuông góc với các khe hở không khí. Nếu một cực lồi của rotor vuông goc hoàn toàn với răng stator, thì sẽ không có moment được tạo ra. Nếu các răng rotor không vuông góc với răng stator, sẽ có một ít từ thông đi qua khe hở và tạo ra moment trên rotor làm quay rotos. Nếu thay đổi công suất trên cuộn dây stator đúng lúc, có thể tạo ra các chuyển động cùng chiều hoặc ngược chiều kim đồng hồ.
Một loại động cơ đồng bộ khác được gọi là động cơ từ trở thay đổi (SR).

Rotor của nó bao gồm các vòng thép với các dãy răng. Các răng này đều có tính từ thẩm ( có thể bị từ hóa ), và các khu vực xung quanh đó thì có độ từ thẩm yếu. Do đó, rotor này không cần đến các cuộn dây, các vật liệu hiếm , hoặc nam châm.
Không giống với động cơ điện từ, không có các thanh rotor và không có dòng điện tạo ra momen trong rotor. Sự thiếu vắng của các thiết bị dẫn trên rotor từ trở thay đổi sẽ giúp giảm bớt tổn hao trên động cơ so với các động cơ thông thường. Moment tạo ra bởi động cơ từ trở này được điều khiển bằng cách thay đổi cường độ dòng điện trong trường điện từ stator. Tốc độ được điều khiển bằng cách điều khiển Moment ( thông qua các dòng cuộn dây). Kỹ thuật này tương tự như cách điều khiển tốc độ bằng dòng điện phần ứng trong độc cơ DC chổi quét truyền thống.
Một động cơ từ trở tạo ra từ trường tỉ lệ với dòng được đưa vào cuộn dây. Việc tạo ram omen không bị ảnh hưởng bởi tốc độ động cơ. Đây là điển khác biệt so với động cơ điện từ AC, khi tốc độ quay cao ở vùng từ trường yếu, dòng rotor sẽ tăng độ trễ so với từ trường stator kho tốc độ motor (rpm) tăng.




cảm ơn các anh chị, em thấy tài lieu của mình hữu ích và rõ rang quá ạ. Lại cập nhật kịp thời theo phiên bản mới của NX. Em muốn 1 cuốn sách hướng dẫn này để có màu sách hình ảnh rõ ràng